




|
功能 |
解釋 |
|
位置補正 |
粒子分析(雙粒子),輪廓模板(雙輪廓),找圓,實現檢測中產品位置不固定的穩定檢測,實現坐標追蹤補正功能。 |
|
3D高度測量 |
支持8bit,16bit,高度圖,單點高度,兩點相對高度,點到平面高度的測量。 區域高度最大值,最小值,平均值。 |
|
輪廓模板 |
搜索區域內登陸的標準輪廓模板,根據外輪廓檢出相應的X,Y角度坐標,定位。 |
|
條碼識別 |
利用高度差合成3維平面信息,識別感興趣區域中的一維碼,二維碼,讀取相應的結果,并且可以存入數據庫,用于輪胎,鑄造件,2D打光條件不好的產品。 |
|
OCR文字識別 |
可以識別產品上的文字信息,進行學習識別,判別錯對,也可輸出至數據庫 |
|
智能找線 |
根據灰度邊緣閾值找出一條線,輸出線的坐標角度, |
|
尺寸測量 |
精確測量產品的尺寸(自帶亞像素)進行判定,也可以輸出至數據庫存檔 |
|
數據運算 |
根據圖像中所有設定的內容信息,進行相應的結果計算, |
|
輪廓坐標提取 |
根據3D高度提取的平面圖。提取出產品的外輪廓,用于走軌跡.先掃描后出坐標,用于小工件焊縫追蹤,點膠應用。輸出相關的X,Y,Z坐標。 |
|
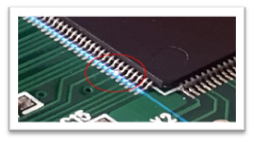
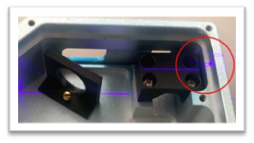
輪廓缺陷 |
雙相機三維拼圖,檢測產品特征點的輪廓缺陷,精確測量缺損部位,輸出面積,坐標。 |
|
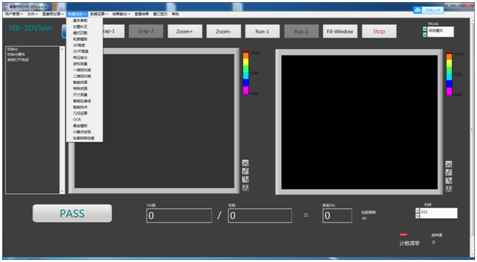
圖像預處理 |
根據16bit,8bit,,給一個完美的前期處理,對圖像中一些不必要的信息進行去除,加強顯示檢測特征,結合3D高度截取處理成16種不同的圖像,以供后續檢測。在不同的檢測要求下使用相關的圖像。 |
|
通訊設定 |
固定IO信號,三菱,歐姆龍,松下,信捷,串口,以太網接口,雅馬哈,安川,愛普生,ABB,FANUC,機器人對接數據傳輸對應。金橙子激光打標。 |
|
多品種模式 |
應對同一臺機器統一時間段檢測不同的產品,進行不同內容的高速設定切換 |
|
數據緩存區 |
實現多次不同時間段拍攝,,不同場合的數據也可以用來計算,實現多面檢測。 |
|
智能找圓 |
三點確定一個圓,非常容易的一種找圓算法,輸出坐標, |
|
多點輸出 |
可以一次性輸出多個檢測點的坐標,與機器人等運動機構配合使用。 |
|
雙3D相機功能 |
大幅面測量,實現橫向,縱向拼接。 解決單相機,特征點高度落差出現死角的問題。 |
|
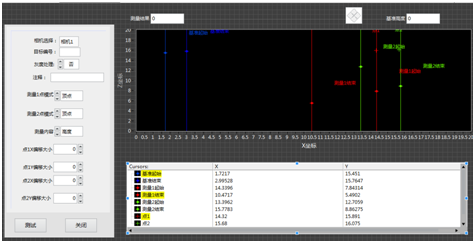
游標測量 |
實現單輪廓數據的實時測量,測量出,高度,高度差,寬度,圓弧曲率,水平角度,垂直角度,焊縫追蹤,點膠的實時引導,縫隙檢測。 |
|
平面度檢測 |
利用最小二乘法對產品平面采集100個點以內的平均高度值,相較于點激光,高效快速測量出產品的平面度,有去除異常點功能。 |